GEMM is a fundamental kernel in CUDA. This blog presents a 4-step progression to accelerate GEMM in Triton, starting from a naive implementation to advanced hardware-specific features.
Note: While this tutorial references the foundational code from the official Triton Toturial 03 Matrix Multiplication (specifically Step 0, Step 1, and the basic L2 cache optimization), it significantly expands upon it. The L2 Cache section introduces advanced snake and dynamic ordering methods, and the final step covering Hopper TMA (Tensor Memory Accelerator) is an entirely original addition not found in the official guide.
Step 0: Naive Tiling in GEMM
To compute the matrix multiplication $C = A \times B$ where $A$ is $(M, K)$ and $B$ is $(K, N)$, we cannot load the entire matrices into SRAM. Instead, we divide the output matrix $C$ into tiles (blocks) of size BLOCK_SIZE_M $\times$ BLOCK_SIZE_N.
Each Triton program (instance) computes one block of $C$ by iterating over the $K$ dimension in steps of BLOCK_SIZE_K, loading the corresponding blocks of $A$ and $B$, computing the dot product, and accumulating the results.
Kernel Implementation
import triton
import triton.language as tl
import torch
@triton.jit
def leaky_relu(x):
return tl.where(x >= 0, x, 0.01 * x)
@triton.jit
def matmul_kernel(
a_ptr, b_ptr, c_ptr,
M, N, K,
stride_am, stride_ak,
stride_bk, stride_bn,
stride_cm, stride_cn,
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr, BLOCK_SIZE_K: tl.constexpr,
ACTIVATION: tl.constexpr,
):
pid = tl.program_id(axis=0)
num_pid_m = tl.cdiv(M, BLOCK_SIZE_M)
num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)
pid_m = pid // num_pid_n
pid_n = pid % num_pid_n
offs_am = (pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)) % M
offs_bn = (pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)) % N
offs_k = tl.arange(0, BLOCK_SIZE_K)
a_ptrs = a_ptr + (offs_am[:, None] * stride_am + offs_k[None, :] * stride_ak)
b_ptrs = b_ptr + (offs_k[:, None] * stride_bk + offs_bn[None, :] * stride_bn)
accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):
a = tl.load(a_ptrs, mask=offs_k[None, :] < K - k * BLOCK_SIZE_K, other=0.0)
b = tl.load(b_ptrs, mask=offs_k[:, None] < K - k * BLOCK_SIZE_K, other=0.0)
accumulator = tl.dot(a, b, accumulator)
a_ptrs += BLOCK_SIZE_K * stride_ak
b_ptrs += BLOCK_SIZE_K * stride_bk
if ACTIVATION == "leaky_relu":
accumulator = leaky_relu(accumulator)
c = accumulator.to(tl.float16)
offs_cm = pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)
offs_cn = pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)
c_ptrs = c_ptr + stride_cm * offs_cm[:, None] + stride_cn * offs_cn[None, :]
c_mask = (offs_cm[:, None] < M) & (offs_cn[None, :] < N)
tl.store(c_ptrs, c, mask=c_mask)
Launcher Function
In this naive version, the block sizes are hardcoded. We use a 1D grid where each program ID (pid) handles one block of the output matrix.
def matmul(a, b, activation=""):
# Check constraints.
assert a.shape[1] == b.shape[0], "Incompatible dimensions"
assert a.is_contiguous(), "Matrix A must be contiguous"
M, K = a.shape
K, N = b.shape
c = torch.empty((M, N), device=a.device, dtype=a.dtype)
# Hardcoded hyper-parameters
BLOCK_SIZE_M = 128
BLOCK_SIZE_N = 128
BLOCK_SIZE_K = 32
grid = (triton.cdiv(M, BLOCK_SIZE_M) * triton.cdiv(N, BLOCK_SIZE_N), )
matmul_kernel[grid](
a, b, c, #
M, N, K, #
a.stride(0), a.stride(1), #
b.stride(0), b.stride(1), #
c.stride(0), c.stride(1), #
BLOCK_SIZE_M=BLOCK_SIZE_M, BLOCK_SIZE_N=BLOCK_SIZE_N, BLOCK_SIZE_K=BLOCK_SIZE_K, #
ACTIVATION=activation #
)
return c
Step 1: Autotuning
Hardcoded block sizes are inherently suboptimal. GPU architecture characteristics (e.g., SRAM capacity, number of SMs) and specific matrix dimensions require dynamic tuning of execution parameters to maximize throughput.
The key parameters to tune are:
- Tiling Dimensions:
BLOCK_SIZE_M,BLOCK_SIZE_N,BLOCK_SIZE_K - Execution Configs:
num_warps(number of warps allocated per thread block) andnum_stages(depth of the software pipeline used to hide global memory latency).
Triton provides the @triton.autotune decorator. During the first execution of the kernel, it compiles and benchmarks the defined search space, caching the optimal configuration for subsequent calls.
Defining the Search Space
We define a list of triton.Config objects representing our search space. We apply the decorator to our kernel and specify key=['M', 'N', 'K'] so that the autotuner re-evaluates the optimal config if the input matrix dimensions change.
💡 Production Tip for LLM Training (
thdformat) In real-world scenarios like LLM training with thethdformat (e.g., packed sequences or variable sequence lengths), theMdimension changes on almost every iteration, whileNandK(typically hidden sizes) remain constant. If you strictly usekey=['M', 'N', 'K'], Triton will trigger a costly autotuning sweep and kernel recompilation for every uniqueMit encounters, severely degrading training throughput. To avoid this massive overhead, production code usually “buckets”Mto the nearest power of 2 (or a multiple of 128/256).
def get_autotune_config():
return [
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 64, 'GROUP_SIZE_M': 8}, num_stages=3,
num_warps=8),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 32, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 32, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=5,
num_warps=2),
triton.Config({'BLOCK_SIZE_M': 32, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=5,
num_warps=2),
# Good config for fp8 inputs.
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=3,
num_warps=8),
triton.Config({'BLOCK_SIZE_M': 256, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=3,
num_warps=8),
triton.Config({'BLOCK_SIZE_M': 256, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 64, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 64, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 32, 'BLOCK_SIZE_K': 64, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4)
]
@triton.autotune(
configs=get_autotune_config(),
key=['M', 'N', 'K'],
)
@triton.jit
def matmul_kernel(
a_ptr, b_ptr, c_ptr,
M, N, K,
stride_am, stride_ak,
stride_bk, stride_bn,
stride_cm, stride_cn,
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr, BLOCK_SIZE_K: tl.constexpr,
ACTIVATION: tl.constexpr,
):
# ... (Kernel compute logic remains identical to step0) ...
Updating the Launcher
Since the autotuner now manages the BLOCK_SIZE parameters, we remove them from the explicit kernel call. The grid calculation must be updated to use a lambda function, which extracts the runtime-injected META configuration.
def matmul(a, b, activation=""):
assert a.shape[1] == b.shape[0], "Incompatible dimensions"
assert a.is_contiguous(), "Matrix A must be contiguous"
M, K = a.shape
K, N = b.shape
c = torch.empty((M, N), device=a.device, dtype=a.dtype)
# Grid now accepts a META parameter containing the selected config
grid = lambda META: (
triton.cdiv(M, META['BLOCK_SIZE_M']) * triton.cdiv(N, META['BLOCK_SIZE_N']),
)
matmul_kernel_v1[grid](
a, b, c,
M, N, K,
a.stride(0), a.stride(1),
b.stride(0), b.stride(1),
c.stride(0), c.stride(1),
ACTIVATION=activation
)
return c
Step 2: L2 Cache Optimizations
This section introduces standard panel swizzling and snake panel swizzling. Panel swizzling significantly improves the L2 cache hit rate by optimizing the scheduling order of thread blocks.
This optimization only modifies the mapping logic of the program IDs (pid_m and pid_n).
Panel Swizzling (Grouped Ordering)
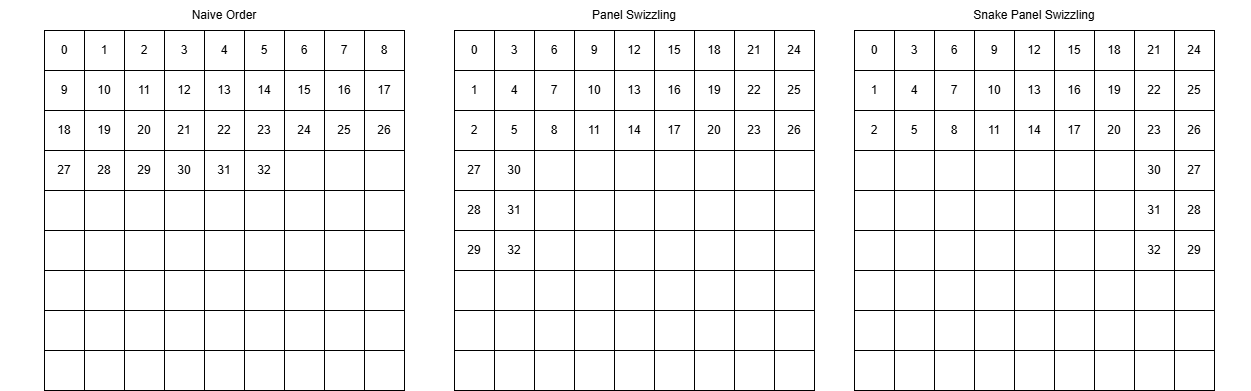
By default, thread blocks are launched in a linear, row-major order. The GPU computes the first row of blocks across all columns before moving to the second row (As show in Fig. Naive Order). This pattern frequently evicts tiles of matrix B from the L2 cache.
Panel swizzling solves this by chunking the execution into groups. A group is defined by a fixed number of block rows (GROUP_SIZE_M) spanning across all available block columns (num_pid_n).
Within each group, the execution order is swizzled to be column-major. The program iterates downwards through the GROUP_SIZE_M rows first, then moves to the next column (As show in Fig. Panel Swizzing). Because the exact same column tile of matrix B is required by all blocks in that column, this localized scheduling keeps matrix B resident in the L2 cache significantly longer, maximizing data reuse.
The naive linear mapping:
pid = tl.program_id(axis=0)
num_pid_m = tl.cdiv(M, BLOCK_SIZE_M)
num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)
# Linear, row-major scheduling
pid_m = pid // num_pid_n
pid_n = pid % num_pid_n
Is optimized to a grouped mapping:
pid = tl.program_id(axis=0)
num_pid_m = tl.cdiv(M, BLOCK_SIZE_M)
num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)
num_pid_in_group = GROUP_SIZE_M * num_pid_n
group_id = pid // num_pid_in_group
first_pid_m = group_id * GROUP_SIZE_M
group_size_m = min(num_pid_m - first_pid_m, GROUP_SIZE_M)
pid_m = first_pid_m + ((pid % num_pid_in_group) % group_size_m)
pid_n = (pid % num_pid_in_group) // group_size_m
Snake Panel Swizzing
In odd-numbered groups, the traversal order of pid_n is reversed (As shown in the Fig. Snake Panel Swizzing). This forms a continuous, snake-like execution path across group boundaries, further minimizing cache eviction. Only the pid_n calculation needs to be modified:
pid_n = tl.where(
group_id % 2 != 0,
num_pid_n - 1 - (pid % num_pid_in_group) // group_size_m,
(pid % num_pid_in_group) // group_size_m
)
Dynamic panel Swizzing
The previous examples strictly group along the M dimension. For optimal memory reuse, the grouping axis should dynamically adapt to the longer dimension of the output matrix.
IS_M_MAJOR is passed as a tl.constexpr, indicating whether $M \ge N$.
if IS_M_MAJOR:
num_pid_in_group = GROUP_SIZE * num_pid_n
group_id = pid // num_pid_in_group
first_pid_m = group_id * GROUP_SIZE
group_size = min(num_pid_m - first_pid_m, GROUP_SIZE)
pid_m = first_pid_m + ((pid % num_pid_in_group) % group_size)
pid_n = tl.where(
group_id % 2 != 0,
num_pid_n - 1 - (pid % num_pid_in_group) // group_size,
(pid % num_pid_in_group) // group_size
)
else:
num_pid_in_group = GROUP_SIZE * num_pid_m
group_id = pid // num_pid_in_group
first_pid_n = group_id * GROUP_SIZE
group_size = min(num_pid_n - first_pid_n, GROUP_SIZE)
pid_n = first_pid_n + ((pid % num_pid_in_group) % group_size)
pid_m = tl.where(
group_id % 2 != 0,
num_pid_m - 1 - (pid % num_pid_in_group) // group_size,
(pid % num_pid_in_group) // group_size
)
Step 3: Hopper TMA (Tensor Memory Accelerator)
The Principle of TMA
Introduced in the NVIDIA Hopper (H100) architecture, the Tensor Memory Accelerator (TMA) is a dedicated hardware engine designed to optimize data transfers between Global Memory and Shared Memory (SRAM).
Traditionally, moving a 2D tile of data requires threads to calculate complex pointer offsets, execute multiple load instructions, and use registers as a staging area before writing to Shared Memory. TMA bypasses this bottleneck. It operates asynchronously and handles multi-dimensional memory layouts entirely in hardware.
Key benefits include:
- Zero-Register Copy: Data moves directly from Global Memory to SRAM, freeing up SM registers.
- Hardware Bounds Checking: Out-of-bounds memory accesses are automatically padded with zeros by the hardware, eliminating the need for manual masking (mask=…) in the kernel.
- Address Generation: Strides and offsets are encoded into a TMA Descriptor, removing integer arithmetic overhead from the SM.
Implementations
- Implementation with
tl.make_block_ptr
tl.make_block_ptr is Triton’s standard abstraction for block-level memory operations. On Hopper architectures, the Triton compiler can automatically lower make_block_ptr and tl.load into hardware TMA instructions if the memory access patterns meet specific alignment and continuity requirements.
Crucially, this high-level API is backward compatible with Ampere (A100) GPUs. On A100, the compiler gracefully falls back to standard asynchronous memory instructions (e.g., cp.async). In contrast, the explicit descriptor APIs discussed in the subsequent two sections are strictly Hopper-exclusive and will fail on A100.
This approach replaces the manual offset arrays and boundary masks used in Step 0, providing a single codebase that scales across hardware generations.
@triton.jit
def matmul_kernel(
a_ptr, b_ptr, c_ptr,
M, N, K,
stride_am, stride_ak,
stride_bk, stride_bn,
stride_cm, stride_cn,
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr, BLOCK_SIZE_K: tl.constexpr,
ACTIVATION: tl.constexpr,
):
pid = tl.program_id(axis=0)
# ... (Omitted: Swizzling logic from Step 2) ...
a_block_ptr = tl.make_block_ptr(
a_ptr, shape=(M, K), strides=(stride_am, stride_ak),
offsets=(pid_m * BLOCK_SIZE_M, 0),
block_shape=(BLOCK_SIZE_M, BLOCK_SIZE_K),
order=(1, 0)
)
b_block_ptr = tl.make_block_ptr(
b_ptr, shape=(K, N), strides=(stride_bk, stride_bn),
offsets=(0, pid_n * BLOCK_SIZE_N),
block_shape=(BLOCK_SIZE_K, BLOCK_SIZE_N),
order=(1, 0)
)
accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):
a = tl.load(a_block_ptr, boundary_check=(0, 1))
b = tl.load(b_block_ptr, boundary_check=(0, 1))
accumulator = tl.dot(a, b, accumulator)
a_block_ptr = tl.advance(a_block_ptr, (0, BLOCK_SIZE_K))
b_block_ptr = tl.advance(b_block_ptr, (BLOCK_SIZE_K, 0))
if ACTIVATION == "leaky_relu":
accumulator = leaky_relu(accumulator)
c = accumulator.to(tl.float16)
c_block_ptr = tl.make_block_ptr(
c_ptr, shape=(M, N), strides=(stride_cm, stride_cn),
offsets=(pid_m * BLOCK_SIZE_M, pid_n * BLOCK_SIZE_N),
block_shape=(BLOCK_SIZE_M, BLOCK_SIZE_N),
order=(1, 0)
)
tl.store(c_block_ptr, c, boundary_check=(0, 1))
- Implementation with
tl.make_tensor_descriptor(Inside the Kernel)
For more explicit control over Hopper’s experimental TMA features, Triton provides the tl.make_tensor_descriptor API. Instead of relying on the compiler’s heuristics to lower make_block_ptr, you explicitly define the hardware descriptor inside the device code.
Crucial Host-Side Setup: When constructing TMA descriptors dynamically, the underlying hardware requires the descriptors to be stored in specifically aligned memory. To prevent memory faults and ensure the allocations synchronize correctly with PyTorch’s execution streams, you must override Triton’s default memory allocator with PyTorch’s caching allocator in your host code before launching the kernel.
This method separates the static descriptor definition from the dynamic block load operations.
Host-side Launcher Code:
# Bind Triton's internal allocations to PyTorch's caching allocator
def _torch_allocator(size, align, stream):
return torch.cuda.caching_allocator_alloc(size, stream=stream)
triton.set_allocator(_torch_allocator)
def matmul(a, b):
# ... (Omitted: Shape checks, constraints, and matrix C allocation) ...
# Grid and kernel launch logic
grid = (triton.cdiv(M, BLOCK_SIZE_M) * triton.cdiv(N, BLOCK_SIZE_N), )
matmul_kernel[grid](...)
return c
Kernel Code:
@triton.jit
def matmul_kernel(
a_ptr, b_ptr, c_ptr,
M, N, K,
stride_am, stride_ak,
stride_bk, stride_bn,
stride_cm, stride_cn,
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr, BLOCK_SIZE_K: tl.constexpr,
ACTIVATION: tl.constexpr,
):
pid = tl.program_id(axis=0)
# ... (Omitted: Swizzling logic from Step 2) ...
a_desc = tl.make_tensor_descriptor(
a_ptr, shape=(M, K), strides=(stride_am, stride_ak),
block_shape=(BLOCK_SIZE_M, BLOCK_SIZE_K),
)
b_desc = tl.make_tensor_descriptor(
b_ptr, shape=(K, N), strides=(stride_bk, stride_bn),
block_shape=(BLOCK_SIZE_K, BLOCK_SIZE_N),
)
accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
base_offset_m = pid_m * BLOCK_SIZE_M
base_offset_n = pid_n * BLOCK_SIZE_N
for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):
offset_k = k * BLOCK_SIZE_K
a = a_desc.load([base_offset_m, offset_k]);
b = b_desc.load([offset_k, base_offset_n]);
accumulator = tl.dot(a, b, accumulator)
# You can fuse arbitrary activation functions here
# while the accumulator is still in FP32!
if ACTIVATION == "leaky_relu":
accumulator = leaky_relu(accumulator)
c = accumulator.to(tl.float16)
# -----------------------------------------------------------
# Write back the block of the output matrix C with masks.
c_desc = tl.make_tensor_descriptor(
c_ptr, shape=(M, N), strides=(stride_cm, stride_cn),
block_shape=(BLOCK_SIZE_M, BLOCK_SIZE_N),
)
c_desc.store([base_offset_m, base_offset_n], c)
- Implementation with
TensorDescriptor(Outside the Kernel)
Constructing descriptors dynamically inside the kernel consumes instruction cycles on the GPU. A more performant engineering practice is to initialize the TMA descriptors on the host (CPU) before launching the kernel and pass them as standard arguments.
This is achieved using the TensorDescriptor utility from Triton’s toolset.
Host-side Launcher Code:
from triton.tools.tensor_descriptor import TensorDescriptor
def matmul(a, b, activation=""):
# Check constraints.
assert a.shape[1] == b.shape[0], "Incompatible dimensions"
assert a.is_contiguous(), "Matrix A must be contiguous"
M, K = a.shape
K, N = b.shape
# Allocates output.
c = torch.empty((M, N), device=a.device, dtype=a.dtype)
# 1D launch kernel where each block gets its own program.
BLOCK_SIZE_M = 128
BLOCK_SIZE_N = 128
BLOCK_SIZE_K = 64
a_desc = TensorDescriptor.from_tensor(a, [BLOCK_SIZE_M, BLOCK_SIZE_K])
b_desc = TensorDescriptor.from_tensor(b, [BLOCK_SIZE_K, BLOCK_SIZE_N])
c_desc = TensorDescriptor.from_tensor(c, [BLOCK_SIZE_M, BLOCK_SIZE_N])
grid = (triton.cdiv(M, BLOCK_SIZE_M) * triton.cdiv(N, BLOCK_SIZE_N), )
is_m_major = M >= N
matmul_kernel[grid](
a_desc, b_desc, c_desc, #
M, N, K, #
BLOCK_SIZE_M=BLOCK_SIZE_M, BLOCK_SIZE_N=BLOCK_SIZE_N, BLOCK_SIZE_K=BLOCK_SIZE_K, #
IS_M_MAJOR=is_m_major, #
ACTIVATION=activation #
)
return c
Kernel Code:
@triton.jit
def matmul_kernel(
a_desc, b_desc, c_desc,
M, N, K,
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr, BLOCK_SIZE_K: tl.constexpr, #
GROUP_SIZE: tl.constexpr,
IS_M_MAJOR: tl.constexpr,
ACTIVATION: tl.constexpr,
):
pid = tl.program_id(axis=0)
# ... (Omitted: Swizzling logic) ...
accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
base_offset_m = pid_m * BLOCK_SIZE_M
base_offset_n = pid_n * BLOCK_SIZE_N
for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):
offset_k = k * BLOCK_SIZE_K
a = a_desc.load([base_offset_m, offset_k])
b = b_desc.load([offset_k, base_offset_n])
accumulator = tl.dot(a, b, accumulator)
if ACTIVATION == "leaky_relu":
accumulator = leaky_relu(accumulator)
c = accumulator.to(tl.float16)
c_desc.store([base_offset_m, base_offset_n], c)
Step 4: Persistent Kernel for Matmul
Standard kernel execution models map a single program (thread block) to a single output tile. For large matrices, this results in launching tens of thousands of blocks, delegating the scheduling entirely to the hardware warp scheduler.
A persistent kernel bypasses the hardware scheduler’s overhead by launching a fixed number of thread blocks—typically matching the maximum number of Streaming Multiprocessors (SMs) on the target GPU. Each thread block executes a while loop, continuously fetching and computing output tiles until the entire matrix is processed.
Key Benefits
- Reduced Launch Overhead: Eliminates hardware block scheduling bottlenecks for large computational grids.
- Software-Defined Scheduling: Enables custom tile distribution logic across SMs, which can be utilized to maximize L2 cache locality beyond standard spatial swizzling.
- Persistent Shared Memory: Data loaded into SRAM can potentially be reused across loop iterations if the scheduling logic is designed to exploit temporal locality.
Kernel Implementation
The primary modification is wrapping the execution logic in a while loop. The initial pid is fetched using tl.program_id(0), and after each tile is computed, the pid increments by the total number of running programs (tl.num_programs(0)).
@triton.jit
def matmul_kernel_persistent(
a_ptr, b_ptr, c_ptr,
M, N, K,
stride_am, stride_ak,
stride_bk, stride_bn,
stride_cm, stride_cn,
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr, BLOCK_SIZE_K: tl.constexpr,
GROUP_SIZE_M: tl.constexpr,
ACTIVATION: tl.constexpr,
):
pid = tl.program_id(axis=0)
num_programs = tl.num_programs(axis=0)
num_pid_m = tl.cdiv(M, BLOCK_SIZE_M)
num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)
total_blocks = num_pid_m * num_pid_n
while pid < total_blocks:
# -- Swizzling Logic (Inherited from Step 2) --
num_pid_in_group = GROUP_SIZE_M * num_pid_n
group_id = pid // num_pid_in_group
first_pid_m = group_id * GROUP_SIZE_M
group_size_m = min(num_pid_m - first_pid_m, GROUP_SIZE_M)
pid_m = first_pid_m + ((pid % num_pid_in_group) % group_size_m)
pid_n = (pid % num_pid_in_group) // group_size_m
# -- TMA Pointers Setup (Inherited from Step 3) --
a_block_ptr = tl.make_block_ptr(
a_ptr, shape=(M, K), strides=(stride_am, stride_ak),
offsets=(pid_m * BLOCK_SIZE_M, 0),
block_shape=(BLOCK_SIZE_M, BLOCK_SIZE_K),
order=(1, 0)
)
b_block_ptr = tl.make_block_ptr(
b_ptr, shape=(K, N), strides=(stride_bk, stride_bn),
offsets=(0, pid_n * BLOCK_SIZE_N),
block_shape=(BLOCK_SIZE_K, BLOCK_SIZE_N),
order=(1, 0)
)
# -- Compute --
accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):
a = tl.load(a_block_ptr, boundary_check=(0, 1))
b = tl.load(b_block_ptr, boundary_check=(0, 1))
accumulator = tl.dot(a, b, accumulator)
a_block_ptr = tl.advance(a_block_ptr, (0, BLOCK_SIZE_K))
b_block_ptr = tl.advance(b_block_ptr, (BLOCK_SIZE_K, 0))
if ACTIVATION == "leaky_relu":
accumulator = leaky_relu(accumulator)
c = accumulator.to(tl.float16)
# -- Store --
c_block_ptr = tl.make_block_ptr(
c_ptr, shape=(M, N), strides=(stride_cm, stride_cn),
offsets=(pid_m * BLOCK_SIZE_M, pid_n * BLOCK_SIZE_N),
block_shape=(BLOCK_SIZE_M, BLOCK_SIZE_N),
order=(1, 0)
)
tl.store(c_block_ptr, c, boundary_check=(0, 1))
# Advance to the next logical block
pid += num_programs
Launcher Implementation
The launcher must be updated to restrict the grid size to the GPU’s available SMs. Launching more blocks than SMs defeats the purpose of a persistent kernel, as it reintroduces hardware scheduling overhead.
def matmul_persistent(a, b, activation=""):
assert a.shape[1] == b.shape[0], "Incompatible dimensions"
assert a.is_contiguous(), "Matrix A must be contiguous"
M, K = a.shape
K, N = b.shape
c = torch.empty((M, N), device=a.device, dtype=a.dtype)
# Query hardware SM count.
# e.g., A100 has 108 SMs, H100 has 132 SMs.
num_sms = torch.cuda.get_device_properties(a.device).multi_processor_count
# The grid size is bounded by the hardware SM count.
grid = lambda Meta: (min(triton.cdiv(M, Meta['BLOCK_SIZE_M'])*triton.cdiv(N, Meta['BLOCK_SIZE_N']), num_sms), )
matmul_kernel_persistent[grid](
a, b, c,
M, N, K,
a.stride(0), a.stride(1),
b.stride(0), b.stride(1),
c.stride(0), c.stride(1),
ACTIVATION=activation
)
return c